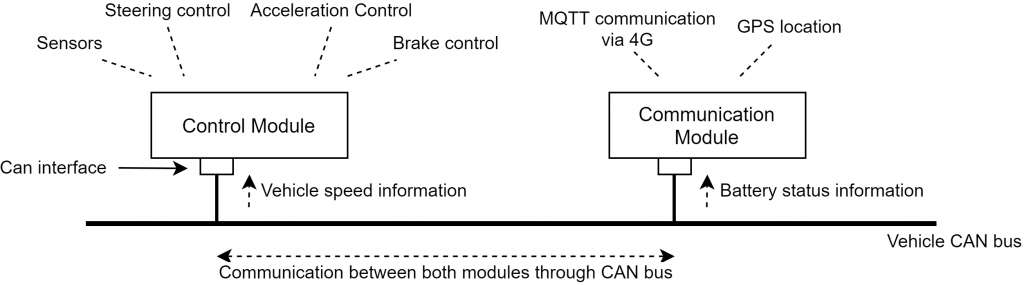
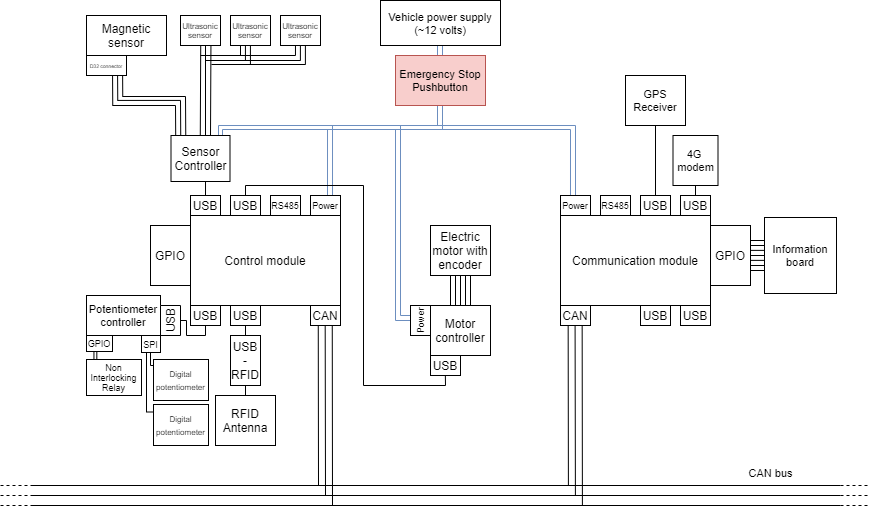
· Monitors the state of the vehicle’s battery and its location, thanks to a GPS receiver connected to it.
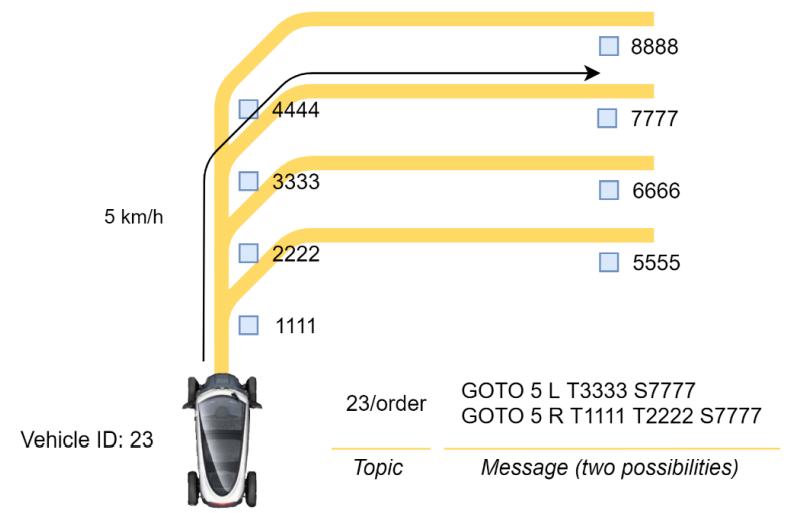
· Manages communication with the back-end, receiving orders and giving information about the state of the vehicle through MQTT. To achieve this communication, a 4G modem is connected to it.
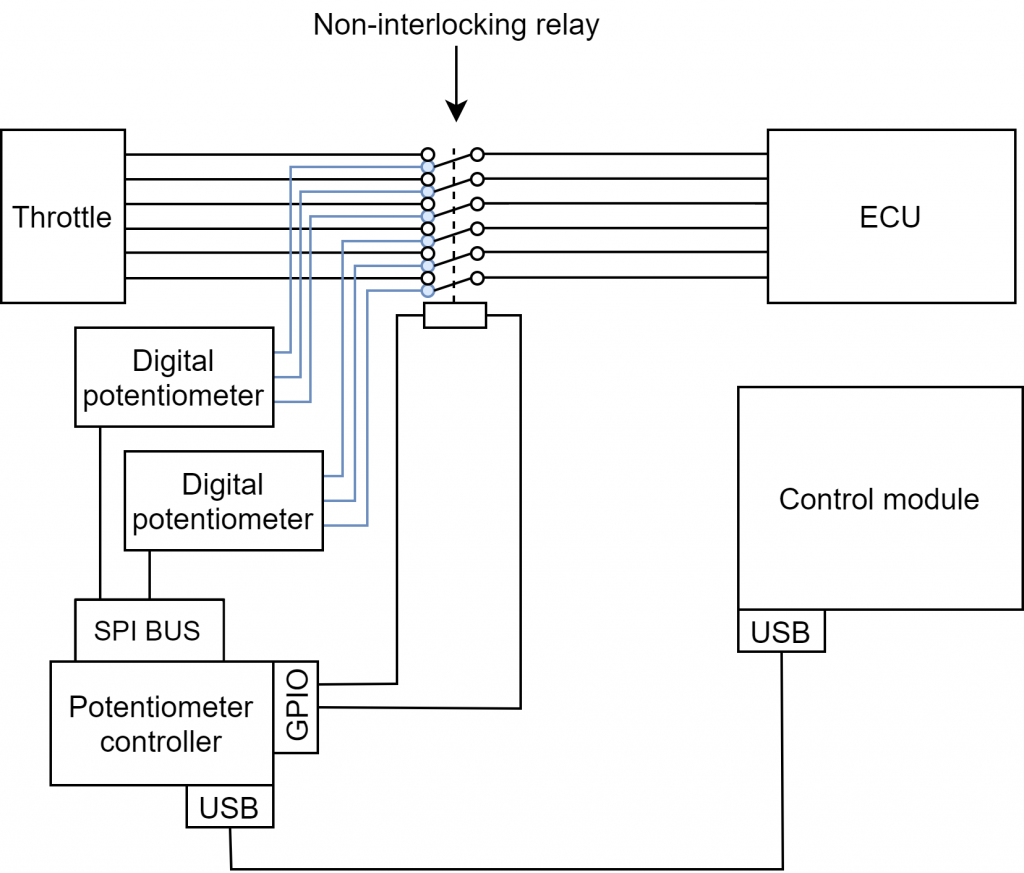
· Controls the Control Module.